WBC gait-clock variant¶
Gait-clock variant (WBCGaitPolicy)¶
NVIDIA's reference repo ships two MuJoCo G1 controllers. The non-gait pair
(run_mujoco_gear_wbc.py: 86-dim observation, 7-wide command, a balance
policy + a walk_policy selected by velocity) is WBCPolicy above. The
gait-clock variant (run_mujoco_gear_wbc_gait.py) is WBCGaitPolicy:
- A single ONNX policy (no balance/walk split).
- A 95-dim observation frame, stacked x6 -> a
[batch, 570]network input. - An 8-wide command block with a
freq_cmdstep-frequency slot inserted at index 4 (so rpy moves to slots[5:8]), set via thegait_frequencykwarg. - A 2-dim bipedal phase clock (
[clock_FL, clock_FR]) appended to each frame - the locomotion rhythm the network steps to.
from strands_robots.policies import create_policy
policy = create_policy(
"wbc_gait", # or the "sonic_gait" shorthand
checkpoint="/path/to/gait-g1", # a 95x6-input gait ONNX checkpoint
target_velocity=[0.5, 0.0, 0.0],
gait_frequency=1.5, # freq_cmd (steps/s)
)
sim.run_policy(robot_name="unitree_g1", policy_object=policy,
target_velocity=[0.5, 0.0, 0.0], gait_frequency=1.5,
duration=5.0, control_frequency=50.0)
The shipped GR00T-WholeBodyControl-Balance.onnx / -Walk.onnx weights are the
non-gait 516-wide family and do not load into this variant; supply a
gait-clock checkpoint whose ONNX input is [batch, 570].
The new ingredient is the phase clock - a small stateful generator
(GaitClock) that turns the velocity command + step frequency into the
left/right-foot phase signal, with a walk-entry reseed, a warm-up ramp, and a
static-stance freeze. It is a verbatim NumPy port of the upstream block (no
torch) and is unit-tested against hand-computed values.
examples/wbc_g1_gait.py --plot-clock
visualizes it through a static -> walk -> static schedule (no checkpoint
needed):
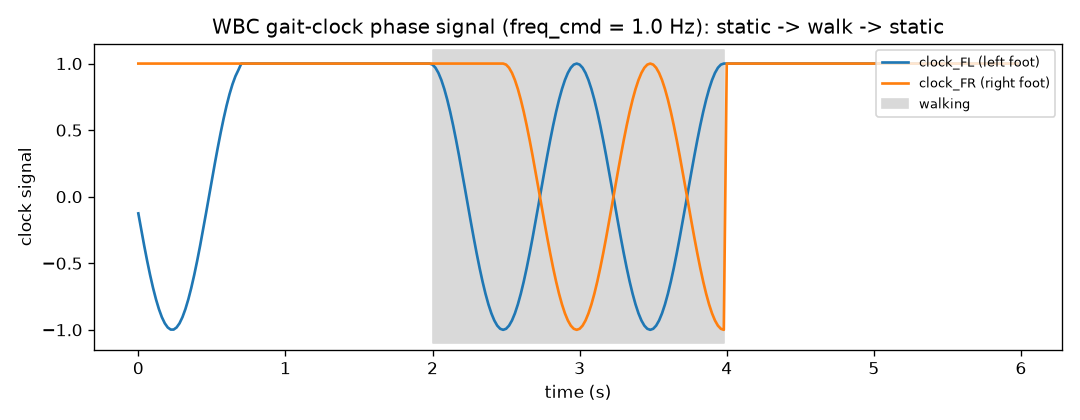
WBCGaitPolicy bipedal phase clock
(freq_cmd = 1.0): both feet are frozen at the held stance while
static, then the left/right channels oscillate half a cycle out of phase
during the walk window, returning to a frozen stance when the command goes
static again. Produced by examples/wbc_g1_gait.py --plot-clock.